Development Guide for nRF52
This document is a collection of tips and best practices for developing on the nRF52 platform. It is designed to evolve continuously with the latest information, and contributions are welcome through pull requests on GitHub.
Using the NanoDAP USB debugging probe
This is a mini-HOWTO on installing the appropriate firmware and adapter software, it is loosely based on this tutorial by RAK.
Required hardware
The RAKDAP1/NanoDAP is a very reasonably priced ($10) USB-based debugging probe. It can be used on many ARM targets but is particularly suited for the nRF52 CPUs. It seems to be based on the ARM daplink project. The fork of this project is located here: nanoDAP. The fork is fairly old with respect to the latest daplink goodness, but it seems fine.
If you are looking to buy a probe, there are many other daplink-based devices available. They are suspected to be mostly identical. If you find one that works well, please add a note to this document.
Required software
You'll need to install the pyocd application to allow VSCode to talk to the NanoDAP. You first install the tool itself but then must add the support files for the nrf52840:
pip3 install pyocd
pyocd pack --i nrf52840
pyocd pack -s
If you are developing on a linux system, you will need to install the udev rules for the NanoDAP.
This is done by copying the rules file from the pyocd distribution to the udev rules directory per these instructions.
Connecting the NanoDAP to your nRF52 target
The NanoDAP has a 10-pin connector, but only three of these pins need to be connected:
- Ground: Connects to the ground on the target.
- TMS-IO: Connects to SWDIO on the target.
- TCK-CK: Connects to SWCLK on the target.
Some web instructions recommend connecting the RESET and 3V3 pins, but this is usually not necessary.
Wiring Guide
This image shows an example connection to a RAK4630 board:
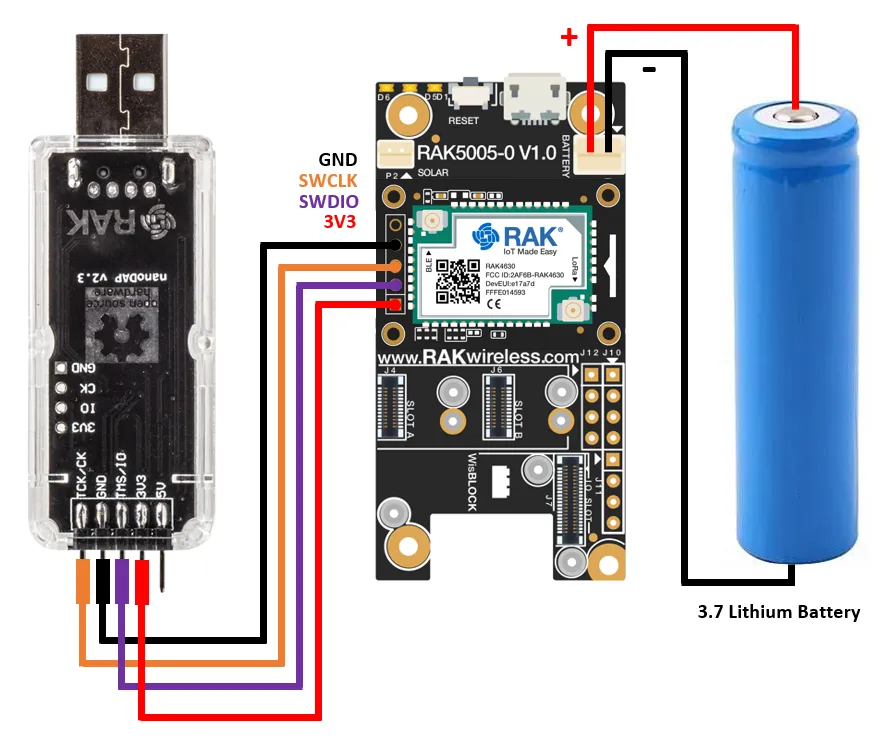 Photo Courtesy of RAKwireless.
Photo Courtesy of RAKwireless.
Using the NanoDAP with VSCode
The Meshtastic project has a special build environment/target which has been configured to work with the NanoDAP. To use it select the "env:rak3631_dap" target via the command palette or in the bottom left of your VSCode/PlatformIO window. Once that target is selected it changes two things:
- Device programming is no longer performed via the USB bootloader. Instead you select "Upload" it will use the NanoDAP to program the device.
- The "Debug" button in VSCode will be enabled. If you click that button it will launch the ICE assisted debugger and you can set breakpoints etc...